
Deciphering city skies: AI unveils GNSS error identification
KNOXVILLE, TN, December 24, 2024 /24-7PressRelease/ — Faced with the persistent challenge of Non-Line-of-Sight (NLOS) errors in urban Global Navigation Satellite Systems (GNSS) navigation, researchers have introduced an innovative solution powered by Artificial Intelligence (AI). By leveraging the Light Gradient Boosting Machine (LightGBM), this method analyzes multiple GNSS signal features to accurately identify and differentiate NLOS errors. This breakthrough promises to significantly improve the precision and reliability of GNSS-based positioning systems, making it a critical advancement for urban navigation, where accuracy is essential.
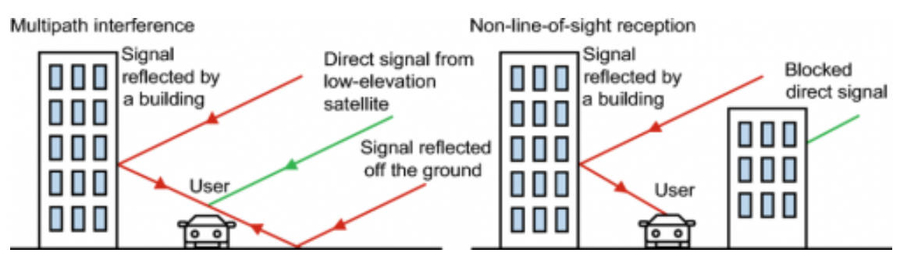
In urban environments, Global Navigation Satellite Systems (GNSS) often struggle with signal obstructions caused by tall buildings, vehicles, and other structures. These obstacles lead to Non-Line-of-Sight (NLOS) errors that cause positioning inaccuracies, which are particularly problematic for technologies like autonomous vehicles and intelligent transportation systems. The need for real-time, effective solutions to detect and mitigate these NLOS errors has never been more urgent, as reliable GNSS-based positioning is vital for the development of smart cities and transportation networks.
Published (DOI: 10.1186/s43020-024-00152-7) in Satellite Navigation on November 22, 2024, this study introduces a cutting-edge machine learning approach to tackle NLOS errors in urban GNSS systems. Researchers from Wuhan University, Southeast University, and Baidu developed a solution using the Light Gradient Boosting Machine (LightGBM), a powerful AI (Artificial Intelligence)-driven model designed to detect and exclude NLOS-related inaccuracies. The model’s performance was validated through dynamic real-world experiments conducted in Wuhan, China, proving its effectiveness in challenging urban environments.
The research highlights an advanced method for identifying NLOS errors in GNSS systems using the LightGBM machine learning model. This method involves the use of a fisheye camera to label GNSS signals as either Line-of-Sight (LOS) or NLOS, based on the visibility of satellites. The researchers then analyzed a range of signal features, including signal-to-noise ratio, elevation angle, pseudorange consistency, and phase consistency. By identifying correlations between these features and signal types, the LightGBM model was able to accurately distinguish between LOS and NLOS signals, achieving an impressive 92% accuracy. Compared to traditional methods like XGBoost, this approach delivered superior performance in both accuracy and computational efficiency. The results show that excluding NLOS signals from GNSS solutions can lead to substantial improvements in positioning accuracy, especially in urban canyons where obstructions are common.
Dr. Xiaohong Zhang, the lead researcher, commented, “This method represents a major leap forward in enhancing GNSS positioning in urban environments. By using machine learning to analyze multiple signal features, we’ve shown that excluding NLOS signals can significantly boost the accuracy and reliability of satellite-based navigation systems. This has profound implications for applications such as autonomous driving and smart city infrastructure.”
This research holds immense potential for industries that depend on GNSS technology, including autonomous vehicles, drones, and urban planning. By improving the detection and exclusion of NLOS errors, this method can enhance the precision of GNSS systems, making navigation safer and more efficient in densely populated cities. As cities become smarter and more connected, this advancement will play a crucial role in supporting the next generation of transportation and navigation technologies.
References
DOI
10.1186/s43020-024-00152-7
Original Source URL
https://doi.org/10.1186/s43020-024-00152-7
Funding information
This research was funded by the National Science Fund for Distinguished Young Scholars of China (Grant No. 42425003), the National Natural Science Foundation of China (Grant Nos. 42274034, 42388102), the Major Program(JD) of Hubei Province (Grant No. 2023BAA026), the Special Fund of Hubei Luojia Laboratory (Grant No. 2201000038), and the Special Fund of Wuhan University-Baidu Map Beidou Cooperative High-Precision Positioning Technology Joint Laboratory.
About Satellite Navigation
Satellite Navigation (E-ISSN: 2662-1363; ISSN: 2662-9291) is the official journal of Aerospace Information Research Institute, Chinese Academy of Sciences. The journal aims to report innovative ideas, new results or progress on the theoretical techniques and applications of satellite navigation. The journal welcomes original articles, reviews and commentaries.
Chuanlink Innovations, where revolutionary ideas meet their true potential. Our name, rooted in the essence of transmission and connection, reflects our commitment to fostering innovation and facilitating the journey of ideas from inception to realization.
Related Link:
http://chuanlink-innovations.com
—
For the original version of this press release, please visit 24-7PressRelease.com here



